Update! 30-12-2022
It’s been a while since I gave an update on the Magnetic Loop controller project I’m working on with Rob PA5RH.
The purpose of the Loop Tuner was that it can tune automatically, and uses the internal SWR meter of the connected radio, and reads this via CAT.
Connection will eventually be possible via Serial RS232, Serial TTL (i.e. CI-V), Bluetooth (i.e. IC-705)
The advantage of this methiod is that you do not need an external SWR measuring bridge.
Our goal is to minimalize the need of extra hardware.
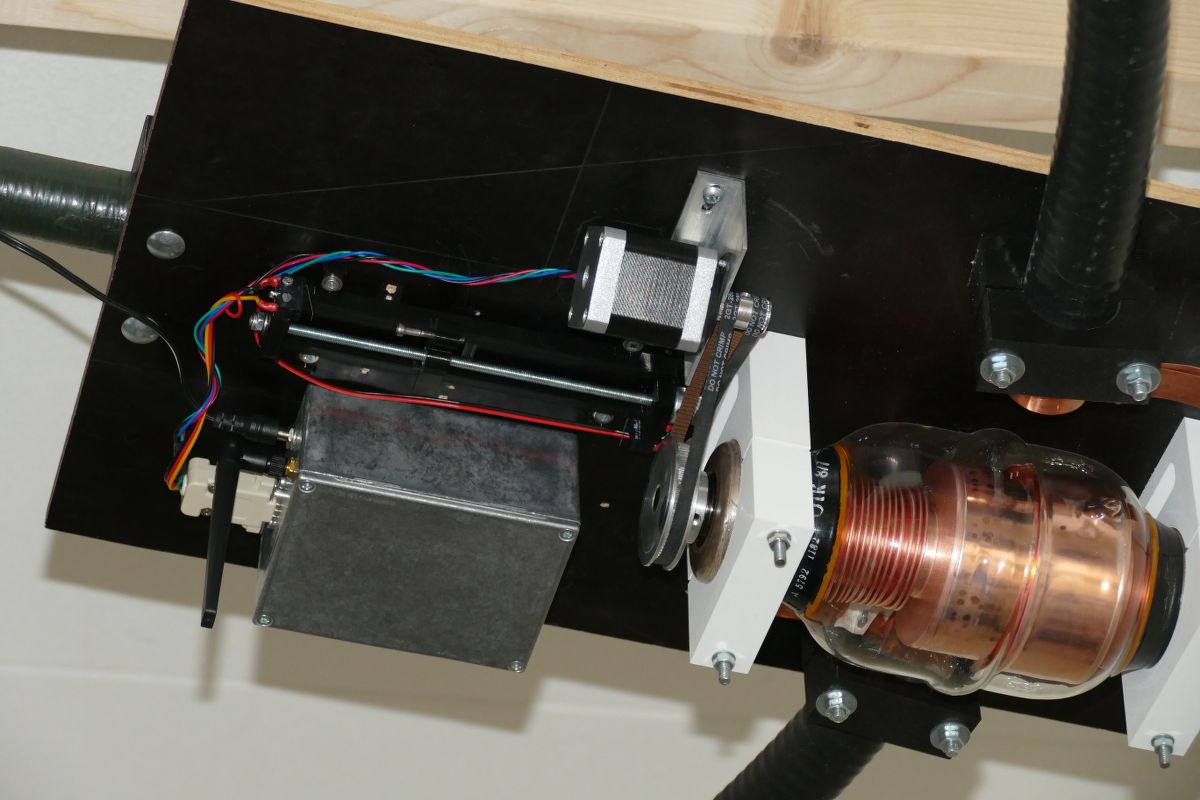
It was also a challenge for us to eliminate the cable running from the controller to the stepper motor of the Loop.
And replace it for a completely wireless connection.
This part is now fully operational.
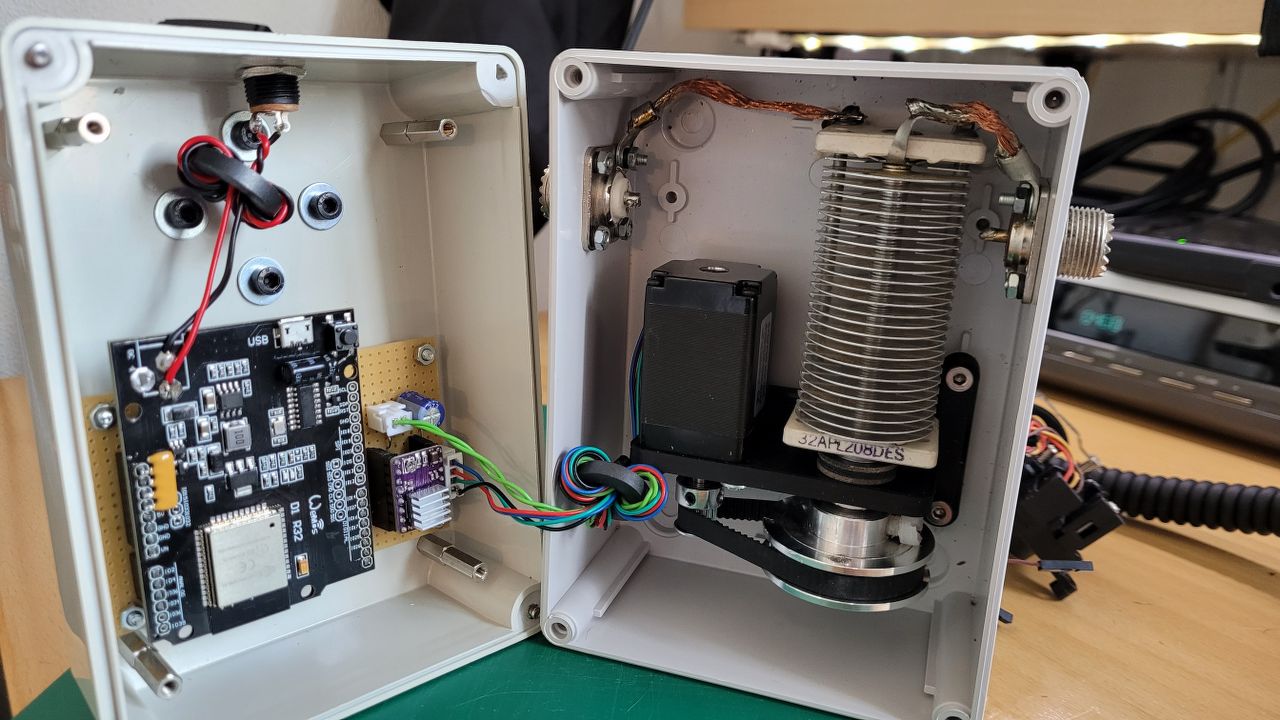
ESP32 modules are used, which are configured with ESP-NOW. This is a very fast Peer to Peer connection. we have not been able to notice any latency in terms of feeling with manual tuning.
Normally the range of an ESP32 module configured in WiFi mode is limited to about 30 to 40 meters.
But with ESP-NOW that range is usually doubled!, and with external antennas on both ESP32 modules range will even extend further!


Because the project is still under development in terms of controller side, I have made a test jig for convenience. this is cut and engraved with a laser cutting machine.
Ultimately, the controller will get its own PCB and a matching compact housing. but this is for later.

Next steps:
- Cat implementation for ICOM.
At the moment the loop tuner works with Kenwood CAT protocol. We are now devising a structure to easily add new protocols/radios to the software. - Device configuration method.
Since this must be a universal Loop controller, it must also be easy to configure.
We are currently also working hard to find a good and easy way so that the user can easily configure his hardware / radio data.